ArduSimple elaborates on how its elegant RTK GNSS systems facilitate the accurate determination of a vehicle’s true heading, emphasizing the significance of familiarizing oneself with key terminology related to vehicle navigation.
In the realm of GNSS and GPS, terms such as heading, course, track, and yaw are frequently interchanged, often leading to misunderstandings about their distinct meanings.
Defining Heading
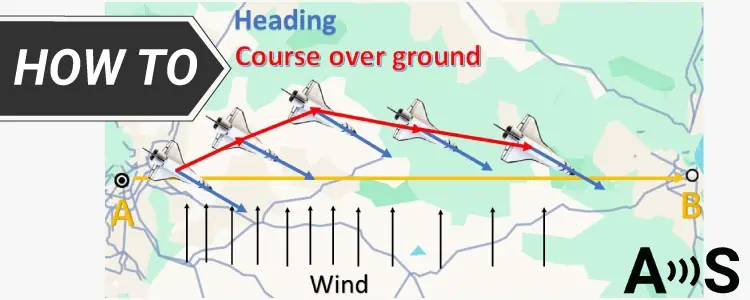
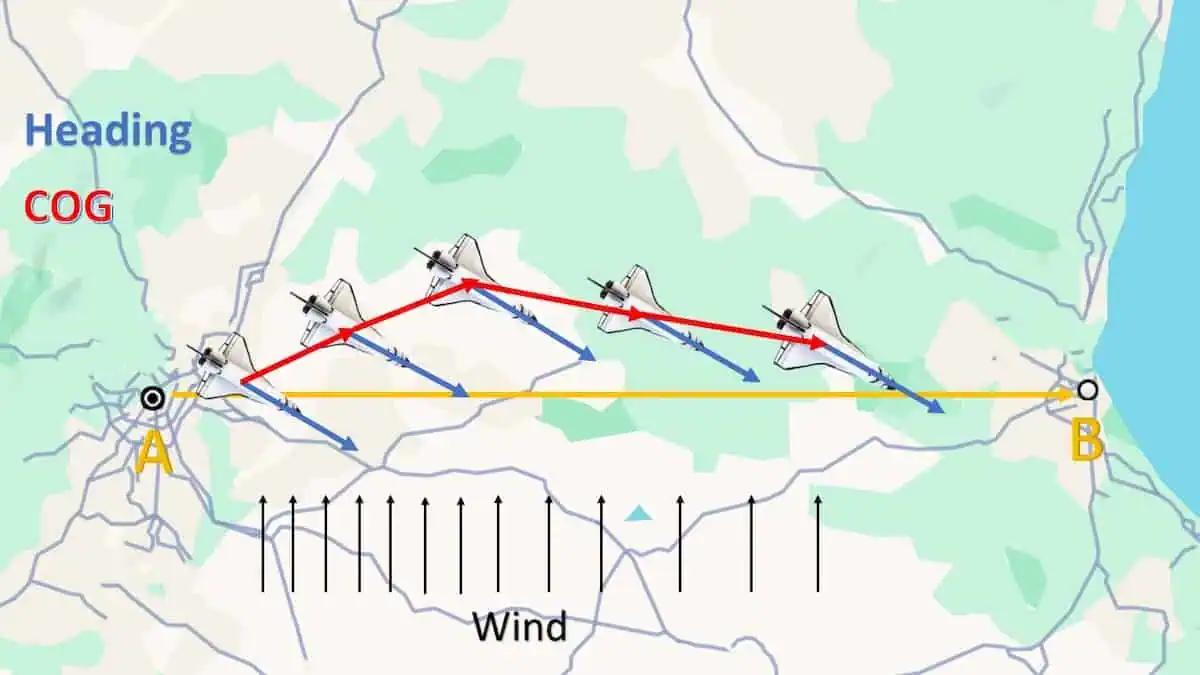
heading denotes the direction a vehicle,vessel,or aircraft is oriented. In the context of GPS devices, this may also be referred to as yaw, which describes the rotation around the vertical axis. Ideally, when traveling from point A to point B, the heading aligns with the intended path.

However, external factors like wind can cause deviations from this intended route, necessitating adjustments to align the vehicle’s nose into the wind.
Understanding Course Over Ground
Course Over Ground (COG) represents the actual direction an object is traveling across the Earth’s surface, taking into account external influences such as wind or water currents.COG illustrates the true path at a given moment, often referred to as the direction of travel. For instance, if the wind is unexpectedly strong, the COG will indicate this shift.
defining Track
track,often referred to as “track line” or “ground track,” describes the documented path of an object’s movement over time. It outlines the series of positions that represent the ancient route taken.

Measuring Heading and Course Over Ground with GNSS Receivers
A GNSS receiver equipped with a single antenna can ascertain COG by tracking positional changes over time while the vehicle is in motion. Though, it cannot detect rotational movements if the object remains stationary. In contrast, a dual-antenna GNSS receiver can determine heading nonetheless of the vehicle’s movement by comparing the positions of both antennas.
Optimal Placement of GNSS Antennas for Accurate Heading Data
To achieve precise heading data, a minimum separation between the two antennas is essential. Increasing the baseline distance (the space between antennas) enhances heading accuracy.
Typically, a minimum of 1 meter is required for sub-degree precision under less-then-ideal conditions.While this may be impractical for many vehicles, satisfactory results can still be obtained with a distance of 0.5 meters. At 0.3 meters, heading data may be somewhat unreliable but still usable for certain applications.
Both GNSS antennas should be identical and oriented the same way to ensure optimal RF phase center alignment and heading accuracy, as the RF phase center is often offset from the physical center of the antenna case. Additionally, it is indeed crucial to use equal-length RF cables for both antennas.
The appropriate positioning update rate depends on the submission: for slower-moving objects, a 1Hz rate may suffice, while faster-moving objects might require updates at 50Hz.

Tips for Enhanced GNSS Heading Measurements:
- utilize identical antennas
- Maximize the distance between antennas
- Ensure consistent physical orientation
- Employ equal-length antenna cables
ArduSimple Solutions for Accurate Heading Measurements:
- simpleRTK2B Heading – Entry-Level Kit: A cost-effective choice for applications with lower update rate needs
- simpleRTK3B Heading: Capable of providing heading updates at rates up to 50Hz
- simpleRTK2B SBC – Advancement Kit: Delivers centimeter-level positioning and sub-degree heading accuracy
Explore the original article >>






