The Axolotl emerging from the water, showcasing its operational position.
Military organizations are continuously striving to enhance the safety of their personnel and equipment in conflict zones. In response to this need, the UK Defense Science and Technology Laboratory (DSTL) initiated the “Map the Gap” competition in 2020, challenging engineering firms to create a vehicle capable of efficiently and safely surveying “wet gaps” (such as rivers and canals) without endangering reconnaissance engineers or divers.
The data collected from these surveys allows military strategists to identify the safest and most effective crossing points for troops and equipment.This is crucial, as traversing wet gaps is often a slow and perilous task, leaving personnel and assets vulnerable to enemy attacks.
Advanced Navigation’s Spatial FOG Dual provided a robust solution for this intricate autonomous hydrographic surveying challenge.
Addressing the Challenge: Developing a Versatile Hydrographic Survey Vehicle for Defense
The challenge parameters included measuring water depth, flow rate, crossing length, riverbed topography, bank height, and assessing ground load capabilities. the vehicles needed to be either remotely controlled or fully autonomous, delivering data in a format that facilitated rapid decision-making. Beyond practical considerations, the innovation in vehicle design and the potential for sensor repurposing were also evaluated, with a budget cap on the solution.
With extensive experience in creating specialized vehicles for data collection, UK-based Ultrabeam was well-prepared for the competition. The initial phase of Map the Gap required participants to showcase a robotic vehicle that met the specified capabilities. The subsequent phase demanded a detailed plan to achieve a defined technology readiness level and a roadmap for operational deployment, including field trials in relevant environments.
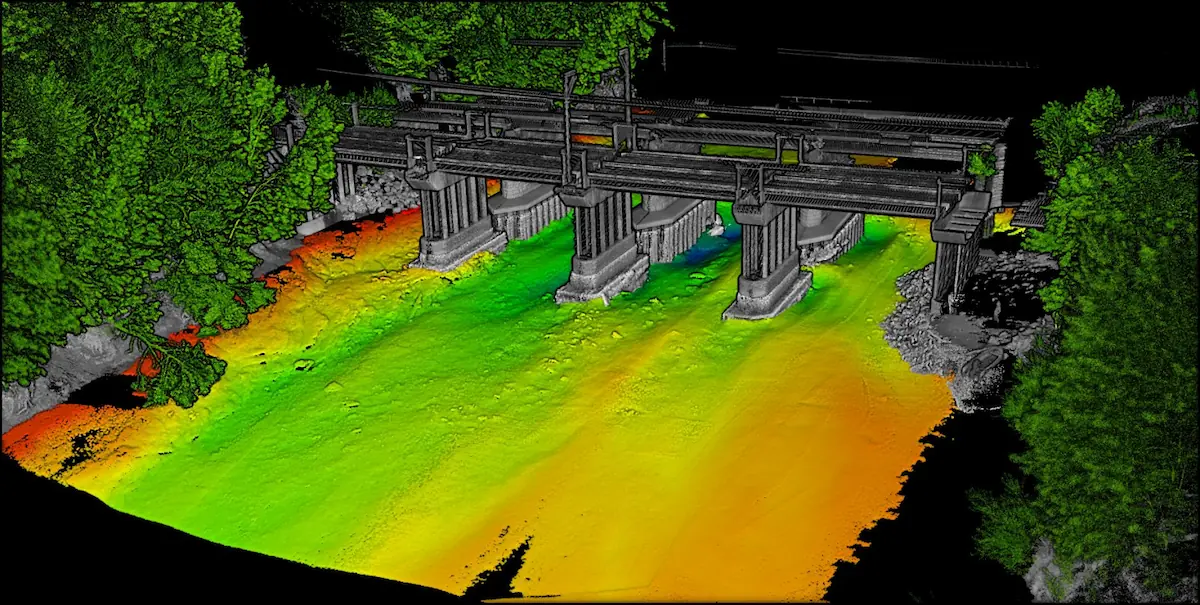
This multifaceted challenge necessitated various sensor technologies for simultaneous 3D surveys above and below water. Above-water surveys utilized dual LiDAR sensors to generate high-resolution point clouds, while below-water assessments involved a suite of sensors, including multibeam sonar, ADCP/DVL (Acoustic Doppler Current Profiler/Doppler Velocity Log), and cone penetrometers. Given the payloadS unsuitability for UAVs (uncrewed aerial vehicles), an amphibious design was ultimately selected to minimize personnel exposure to danger during deployment and retrieval.
Ultrabeam aimed for a sensor package that could be easily transferred to other vehicles as needed. They integrated multiple sensors into a single unit and chose the four-wheeled Axolotl vehicle for the project’s second phase.
Enhancing Navigation: Fiber Optic Gyroscope INS Technology for Improved Performance
The Axolotl generates substantial data from its various sensors,all of which must be accurately geo-referenced for location and orientation. Given its military application, it is indeed essential for the Axolotl to function independently of GNSS. This necessitates a navigation system capable of dead-reckoning and maintaining precise heading over extended periods. Advanced Navigation’s Spatial FOG Dual, a proven GNSS/INS solution, was chosen for its superior performance. Unlike the previous MEMS-based system, which could maintain an accurate heading for about 60 seconds without GNSS, the Spatial FOG Dual successfully maintained accuracy for over 15 minutes.
Advanced Navigation,Spatial FOG Dual
The Axolotl’s short wheelbase made it prone to rapid changes in direction and orientation on uneven terrain. Additionally, while in water, the vehicle experienced drift and movement due to currents and waves, complicating dead-reckoning for small watercraft. Though, the Spatial FOG Dual’s high sampling rate and optical gyroscope technology, which features no moving parts, minimizes errors caused by shock and vibration.
Form factor and ease of integration were critical for the Axolotl. The compact size and lightweight nature of the Spatial FOG Dual made it suitable for applications beyond the competition. The Ultrabeam team developed a software driver to incorporate the Advanced Navigation solution into their survey management and mission control software, enabling the Spatial FOG Dual to provide motion data for autonomous mission control and object detection.
Outcome: A Robust Navigation Solution for Complex autonomous Hydrographic Surveys

Image showing part of the Axolotl sensor payload, designed for easy repurposing to other vehicles.
The prosperous outcomes from the Map the Gap Phase 2 assessments and field trials highlighted the Axolotl’s capability to perform the required survey and measurement tasks, showcasing design innovation and effective implementation. The vehicle’s mechanical design, advanced sensor integration, and extensive use of AI for autonomous mission control and navigation underscored a cutting-edge approach.
since participating in Map the Gap,Ultrabeam has utilized the Axolotl for commercial waterway surveys,including bridge site assessments and riverbed condition evaluations. Its ability to gather all necessary data in a single pass from the same location has proven to be both efficient and cost-effective for clients. The long-duration dead-reckoning accuracy of the Spatial FOG Dual was crucial for maintaining the Axolotl’s course during these missions, especially in areas where GNSS signals are weak or unavailable.
The Axolotl project has not only yielded significant benefits and recognition from the Map the gap competition but has also enhanced Ultrabeam’s fleet of survey vehicles. By carefully selecting the right components for the task while envisioning future applications,and integrating each sensor into a refined AI mission control system,ultrabeam has developed a unique,resilient,uncrewed autonomous hydrographic survey vehicle capable of conducting multiple high-quality surveys on land and in water together.