
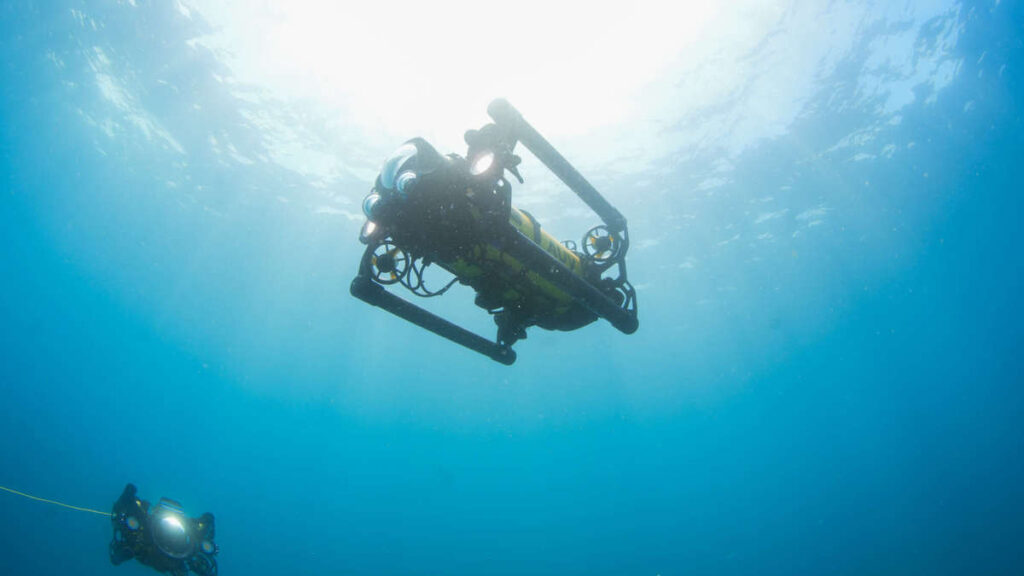
Hovering autonomous underwater vehicles (AUVs), exemplified by the Boxfish AUV, are revolutionizing underwater exploration and operational efficiency.
Unlike traditional remotely operated vehicles (ROVs) that rely on cables for power and dialog, hovering AUVs operate independently. These advanced vehicles utilize complex systems that facilitate autonomous navigation and communication beneath the water’s surface.
A key technology enabling this untethered operation is acoustic signaling.Acoustic communication is essential as radio waves, typically used for surface and aerial communications, do not travel well underwater.Acoustic signals can traverse significant distances in aquatic environments, making them ideal for navigation and data transmission.
Underwater Navigation Obstacles
Underwater navigation presents unique challenges,primarily due to the absence of GPS and limited visibility. Boxfish Robotics AUVs employ a blend of dead reckoning and acoustic positioning techniques to navigate effectively. This is further augmented by stereo camera systems and optional imaging sonar.
Dead reckoning is facilitated through a Doppler Velocity Log (DVL), which measures speed, heading, and local water currents. For acoustic navigation, the AUVs utilize Ultra-Short Baseline (USBL) systems, which are compact and easy to deploy. These systems also support two-way communication for real-time monitoring and control.
Essential Navigation Components
- USBL: This system determines the vehicle’s position by measuring the time it takes for acoustic signals to return from underwater beacons. While it offers high precision, USBL systems can be influenced by signal reflections and environmental factors.
- IMU: The inertial measurement unit (IMU) consists of accelerometers and gyroscopes to monitor acceleration and angular velocity, along with a magnetometer for heading determination.
- DVL: The Doppler Velocity Log assesses velocity relative to the seabed using acoustic signals. When paired with USBL, it enhances positional accuracy and reduces drift. DVL also provides altitude data and aids in obstacle avoidance.
- Depth Sensor: High-resolution depth sensors deliver accurate depth measurements.
- Surface GNSS/GPS: Global navigation satellite systems at the surface provide precise location data, which is transmitted acoustically to the AUV to update its positional awareness.
Enhanced navigation through Sensor Fusion
To improve navigational precision, Boxfish employs sensor fusion techniques. By integrating data from USBL, IMU, DVL, and thrust-based dead reckoning, the limitations of individual instruments are mitigated, resulting in enhanced overall system performance.
Boxfish auvs are also equipped with additional instruments such as multibeam imaging sonar, stereo camera systems, extra depth sensors, and magnetometers. These tools improve object detection, prevent collisions, and ensure accurate positioning during complex missions.
Mission management is facilitated through the Boxfish SafePath Planner software. Featuring an intuitive interface,operators can set waypoints,adjust sensor parameters,and outline thorough mission workflows. The software integrates seamlessly with onboard navigation systems, providing a reliable framework for autonomous operations.
Advantages of Tetherless Hovering AUVs
Hovering AUVs that operate without tethers present numerous advantages over tethered ROVs. They eliminate the risk of cable entanglement, a frequent issue in complex underwater environments. Additionally, they perform more effectively in deeper or more challenging locations where tethers can be restrictive or hazardous.
Operating untethered allows AUVs to cover larger areas and conduct extended missions. This capability makes them especially effective for seabed mapping, habitat monitoring, and environmental data collection.
Hovering AUVs are utilized across various sectors,including scientific research,industry,and defense. In marine research, they are employed to study coral reef ecosystems, track marine species, and monitor water quality. Their stability while hovering makes them ideal for precise measurements and close-up observations.
AUVs equipped with pitch control are particularly adept at photogrammetry. They can navigate around coral formations using multiple camera angles and sonar, avoiding collisions and minimizing damage to fragile ecosystems.
In commercial settings, hovering AUVs are used to inspect underwater structures such as cables, pipelines, and offshore platforms. Their untethered nature allows them to maneuver around obstacles and access confined or challenging locations that traditional ROVs may struggle to reach.
Boxfish Robotics’ hovering auvs signify a significant advancement in subsea capabilities, operating autonomously and efficiently in demanding environments.By utilizing acoustic systems for both positioning and communication,they execute complex tasks at depth with remarkable precision and adaptability.
Read the original article >>











