

The Lixel X1 SLAM scanner integrated with the APUS system and DJI M350RTK
Laser scanning technology has emerged as one of the most efficient and precise methods for collecting detailed geographic data.
SatLab Geosolutions’ UAV LiDAR systems excel in capturing extensive, high-efficiency, and high-accuracy point cloud data. The SLAM-based laser scanning technology, which operates independently of GNSS, allows for the rapid and precise collection of high-resolution point cloud data.
Conducting large-scale topographic surveys often involves navigating expansive areas, complex terrains, and the necessity for high mapping accuracy. Conventional single-point surveying techniques can be labor-intensive and may not achieve the required precision and efficiency for effective topographic mapping.
The following case study illustrates how the integration of two LiDAR technologies facilitates the swift acquisition of high-resolution spatial data while enhancing data integrity compared too single-method approaches.
Survey Project Overview
This extensive topographic survey covered an area of approximately 1.5 square kilometers, featuring a height variation of 30 meters and around 60% vegetation coverage. The region included villages with interconnected houses, side walls, and various facilities, including numerous tin shacks.
The mapping results required an elevation error margin of less than 5 cm, with no data gaps in sheltered regions, such as those beneath tin shacks and eaves.

Aerial view of the survey area
Obstacles Encountered
Gathering accurate and detailed topographic data in densely vegetated areas using photogrammetry presents significant challenges due to the complex nature of the surroundings.
Traditional surveying techniques, such as total station and RTK operations, can be time-consuming and may struggle to effectively cover large or hard-to-reach areas.
Proposed Solution
During the data collection phase, challenges arose from densely forested regions and uneven terrain. To efficiently scan the expansive area, the APUS LiDAR system was combined with a DJI M350RTK. This configuration proved highly effective in gathering accurate and detailed data, even in challenging locations.
Alongside the APUS LiDAR system, the Lixel X1 SLAM scanner was employed to enhance data capture, notably in areas obstructed by structures like tin shacks or roofs. This integration allowed for a more extensive and detailed scan of the entire survey area.
To ensure data accuracy, multiple RTK checkpoints were established throughout the survey area. these checkpoints were utilized to validate the fused point cloud data, guaranteeing that the final dataset was as accurate and precise as possible.
Technical Specifications
Equipment used
- Lixel X1 SLAM scanner with RTK module
- APUS LiDAR system
- DJI M350RTK
- SatLab SL900 GNSS receiver
- CORS network
Software Utilized
- Lixel studio
- Sat-LiDAR
Technical Workflow

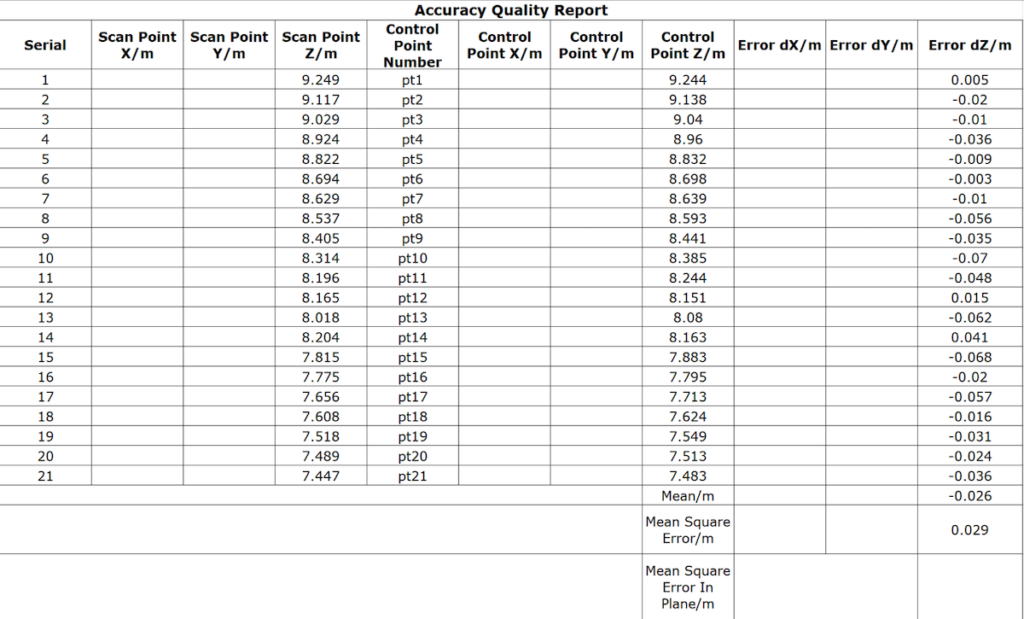
Outcomes Achieved
The two types of point clouds were aligned within a common coordinate system and seamlessly integrated,resulting in an average dZ of -0.026 and a root mean square error of 0.029 (GCP).

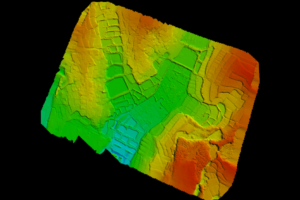
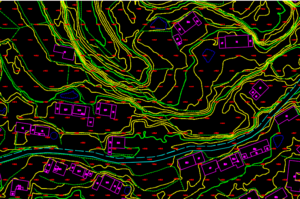
The high-integrity, centimeter-resolution point cloud was processed using Sat-LiDAR software to classify ground points. This facilitated the extraction of clear ground facts in sheltered areas, resulting in highly accurate digital elevation models (DEM) and digital line graphics (DLG).
Final Thoughts
The integration of UAV LiDAR and SLAM scanner technologies offers a powerful approach to enhancing the accuracy and reliability of survey data. UAV LiDAR is capable of producing highly detailed 3D representations of terrain and underlying features, while SLAM scanning ensures precise positioning and tracking of the UAV during surveys.
Together, these technologies generate comprehensive and precise survey data, supporting various applications in urban planning, construction monitoring, and natural resource management.their growing popularity across industries is attributed to their ability to deliver accurate and extensive survey data, providing significant benefits to professionals in multiple fields.
Read the original article >>















