ArduSimple explains how to set up MissionPlanner and QGroundControl for transmitting RTK base station corrections to an autopilot for drones and robotics.
The steps have been validated with simpleRTK2B, simpleRTK2Blite, and simpleRTK3B GNSS receivers. For those interested in using an NTRIP service, a separate tutorial is available.
Required hardware:
- simpleRTK2B – Basic Starter Kit
- 2 x USB to micro-USB cable
- Holybro Pixhawk4 (or any preferred autopilot)
- A PC or laptop
Required software:
- Mission Planner or QGroundControl
- RTKLIB STRSVR (only for QGroundControl)
- MAVProxy (only for QGroundControl)
How to Send RTK Base Station Corrections to ArduPilot with Mission Planner, QGroundControl, and MAVProxy
1. Set up your GNSS receiver as a base station. If you’re unsure how, refer to ArduSimple’s tutorial on configuring the simpleRTK2B as a static base station. For the simpleRTK3B, follow this guide for its base station configuration.
2. Attach the GNSS antenna to your receiver and position it in a place with a clear view of the sky.
3. Connect the autopilot to your PC via USB or a radio telemetry link.

Mission Planner
For Mission Planner, the process is straightforward, with identical instructions for simpleRTK2B, simpleRTK2Blite (u-blox ZED-F9P), and simpleRTK3B (Septentrio Mosaic X5) receivers.
4. Open Mission Planner and connect to your autopilot via the COM port.
5. Navigate to SETUP → Optional Hardware → RTK/GPS Inject.
6. Choose the COM port for your GNSS base station and set the correct baud rate, then click Connect.

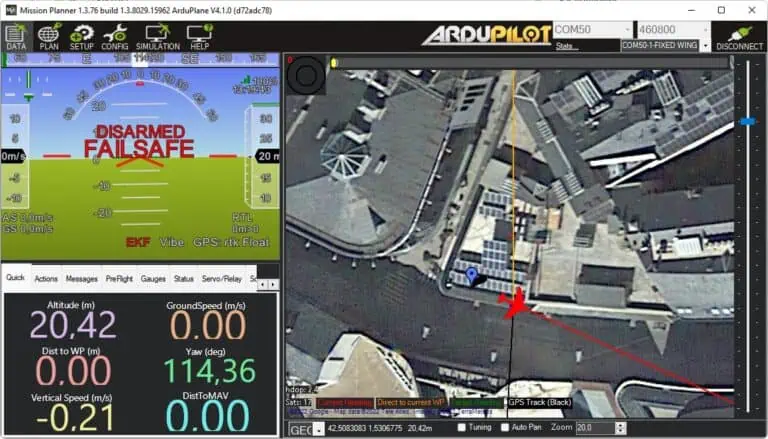
7. At this point, you can link your Heading kit to the autopilot by following this tutorial. Return to the main screen of Mission Planner, where you’ll see both the base station and ArduPilot GNSS positions displayed.
QGroundControl
QGroundControl automatically detects both the simpleRTK2B and simpleRTK3B boards (but not the simpleRTK2Blite) when connected via USB to the same computer running QGroundControl. It auto-configures the receiver and begins sending corrections to the GNSS receiver on the Autopilot.
However, as the automatic configuration may not always perform as expected, this guide will present an alternative method that also supports simpleRTK2Blite as base stations and works reliably.
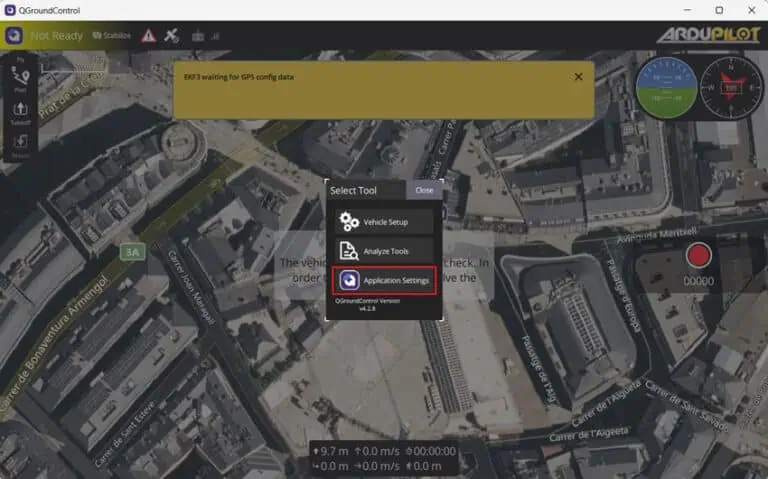
4. Launch QGroundControl and open Application Settings from the main menu.
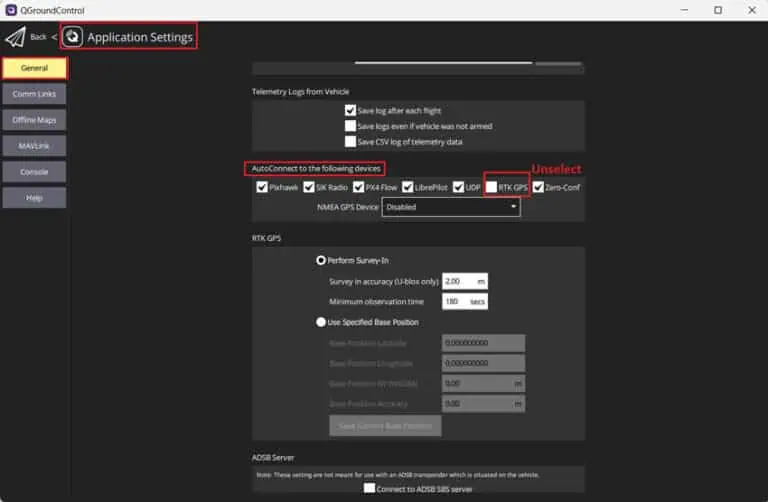
5. Navigate to General → AutoConnect to the following devices → Unselect RTK GPS.
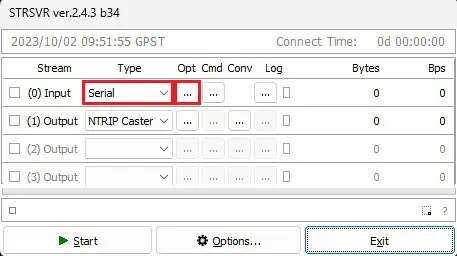
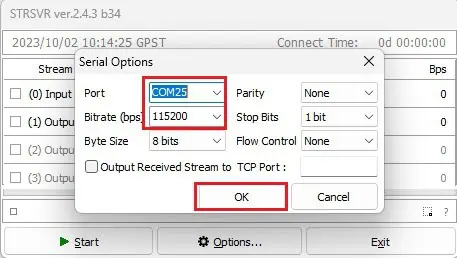
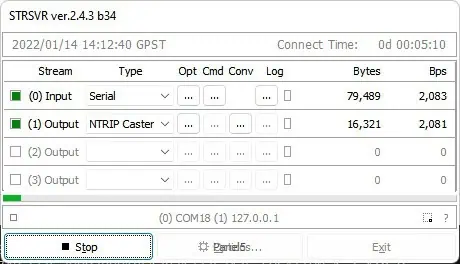
6. Start the STRSVR application. Set Input to Serial port, then click the Opt… button.
7. In the Port field, select the COM port of your GNSS receiver base station, and set the Bitrate to match your GNSS receiver’s baud rate. Click OK.
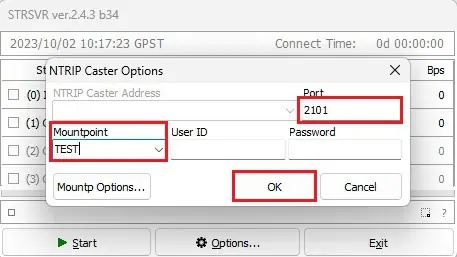
8. Select (1) Output to NTRIP Caster and click the Opt… button.
9. Choose a Port (e.g., 2101) and set the Mountpoint (e.g., TEST). Leave UserID and Password blank, then click OK.
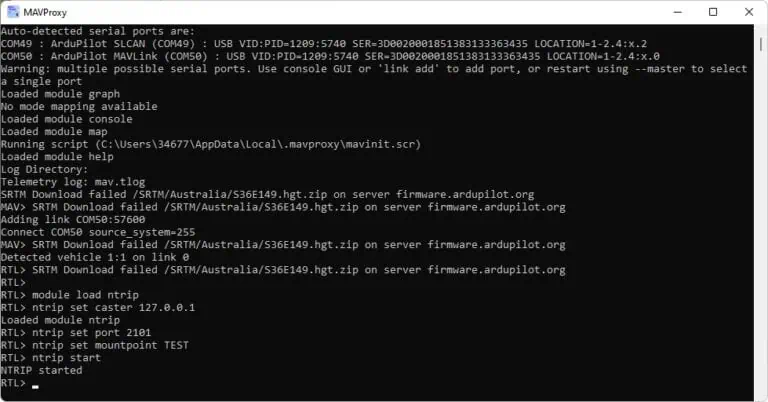
10. Start MAVProxy and go to Link → Add → Serial, selecting the telemetry link or autopilot COM port and configuring the Baud Rate. Click Add Link.
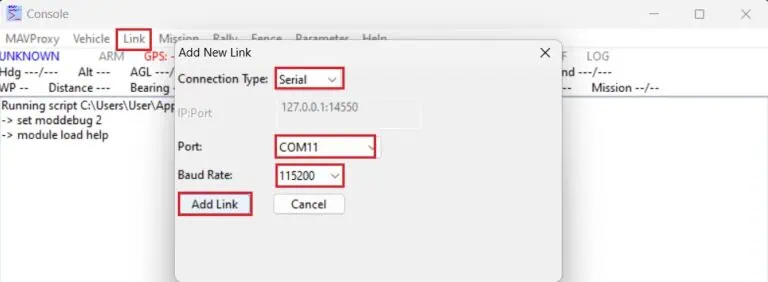
11. If the connection is successful, MAVProxy’s screen should resemble the example provided.
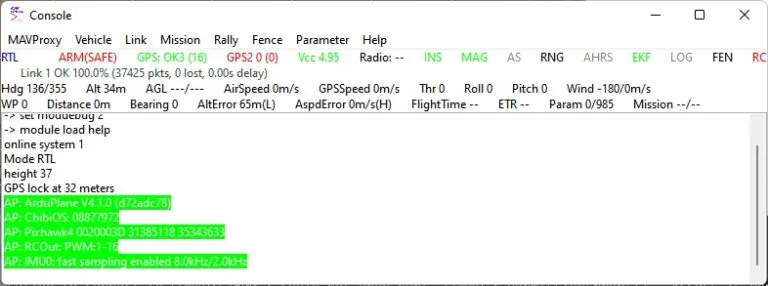
12. Open the MAVProxy terminal and enter the following commands:
module load ntrip ntrip set caster 127.0.0.1 ntrip set port 2101 ntrip set mountpoint TEST ntrip start
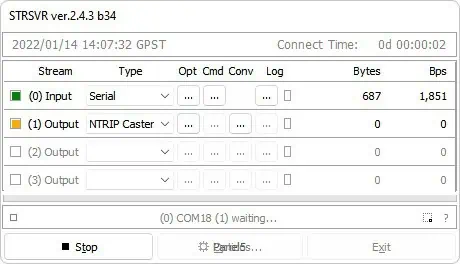
13. After completing the above steps, STRSVR should show data transmission in progress.
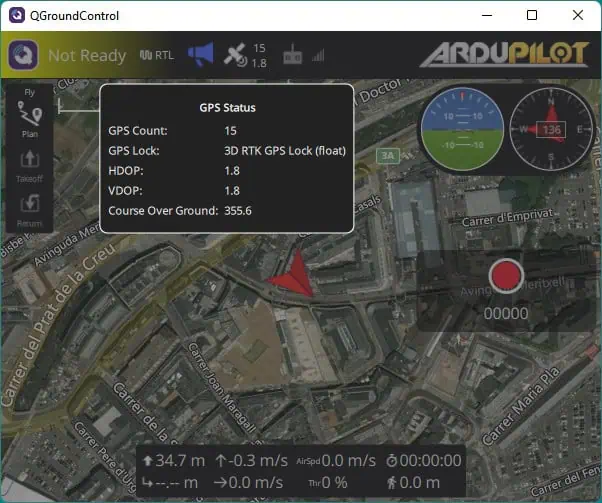
14. The GNSS receiver connected to the autopilot will automatically receive RTCM messages from the base station and enter RTK fix/float mode.
ArduSimple provides all the necessary products for this tutorial:
- simpleRTK2B – Basic Starter Kit
- 2 x USB to micro-USB cable
Read the original guide >>






